Los sistemas de comunicación intervehicular (CIV) prometen muchos servicios potencialmente beneficiosos. Imagínese un control de crucero adaptativo que vigile las distintas velocidades y posiciones de los vehículos cercanos para ajustar automáticamente la velocidad y evitar colisiones. La congestión del tráfico puede reducirse transmitiendo las condiciones en tiempo real y desviando a los automovilistas a carreteras menos congestionadas. Estas medidas podrían incluso reducir la contaminación al disminuir la duración total de los desplazamientos.
Por desgracia, un enlace de comunicaciones estable se enfrenta a numerosos retos de diseño. Los sistemas IVC requieren la capacidad de transmitir y recibir señales omnidireccionales. Una sola antena puede lograr este objetivo si está perfectamente colocada; sin embargo, los vehículos ofrecen muy pocas posiciones prácticas de montaje. Por lo general, esto excluye la posibilidad de una colocación óptima y conduce al uso de múltiples antenas. En esta disposición MIMO, el ingeniero de diseño debe garantizar una cobertura completa. La forma del vehículo y la composición de los materiales complican aún más las cosas, ya que estas propiedades afectan a las características de impedancia y radiación de la antena.
Las variables externas también influyen en el diseño de los sistemas IVC. Estos productos deben funcionar en diversos entornos y condiciones de funcionamiento. La presencia de un tractor con remolque cerca puede reflejar o bloquear las señales. Una superficie de carretera mojada propagará los campos de forma diferente a una seca, y la propagación en cañones urbanos perturba muchos sistemas de comunicación.
Descubrir y abordar estos obstáculos durante la fase de diseño reduce en gran medida la posibilidad de costosas reelaboraciones y mejora sustancialmente las posibilidades de éxito en el lanzamiento del producto; sin embargo, las mediciones por sí solas pueden resultar insuficientes. Puede ser difícil o imposible obtener una variedad de vehículos para probar. Trasladar una antena a distintos lugares de montaje y realizar nuevas mediciones lleva mucho tiempo, y el sistema no siempre puede probarse en su entorno de funcionamiento real. Además, las mediciones sólo pueden realizarse una vez finalizados el diseño y la fabricación. El coste y el tiempo de fabricación pueden hacer que los ciclos de diseño sean largos y costosos.
XFdtd proporciona un medio preciso y eficaz de modelizar estos problemas. Ofrece a los ingenieros un control completo del número y tipo de vehículos presentes, así como de las condiciones ambientales circundantes. El diseño de una antena o un conjunto de antenas en XF se traslada sin problemas a las pruebas in situ utilizando la misma aplicación, y se obtiene un proceso de diseño más sólido evaluando los escenarios de funcionamiento reales antes de la fabricación.
Este ejemplo considera un sistema IVC funcionando en condiciones de tráfico de autopista sobre una superficie de carretera seca. Dos vehículos de pasajeros ocupan el carril derecho de la autopista con un gran camión tractor a su izquierda, como se muestra en la Figura 1. Un monopolo vertical sintonizado a 5,9 GHz y montado en el coche trasero funciona como transmisor IVC. Un monopolo vertical sintonizado a 5,9 GHz y montado en el vehículo trasero funciona como transmisor IVC. Las simulaciones iniciales capturan las interacciones de campo entre los tres vehículos y la superficie de la carretera para determinar la viabilidad de realizar experimentos más complejos en el futuro.
Nuestro ejemplo comienza construyendo la carretera bajo los coches. El tramo de carretera de 12 metros de la Figura 1 se construyó con las potentes y sencillas herramientas de modelado CAD de XF. Una breve búsqueda en Internet permitió obtener archivos CAD de una amplia gama de marcas y modelos de vehículos. XF admite una gran variedad de formatos CAD, lo que facilita la búsqueda de archivos compatibles para su importación; además, las bibliotecas de materiales incorporadas ya contienen la mayoría de los materiales necesarios para este trabajo. La figura 2 muestra varios materiales que se añaden al proyecto desde las bibliotecas de materiales instaladas. Al aprovechar las bibliotecas CAD y de materiales existentes, los ingenieros emplean menos tiempo en generar modelos o buscar propiedades de materiales, lo que reduce el tiempo de configuración del proyecto.
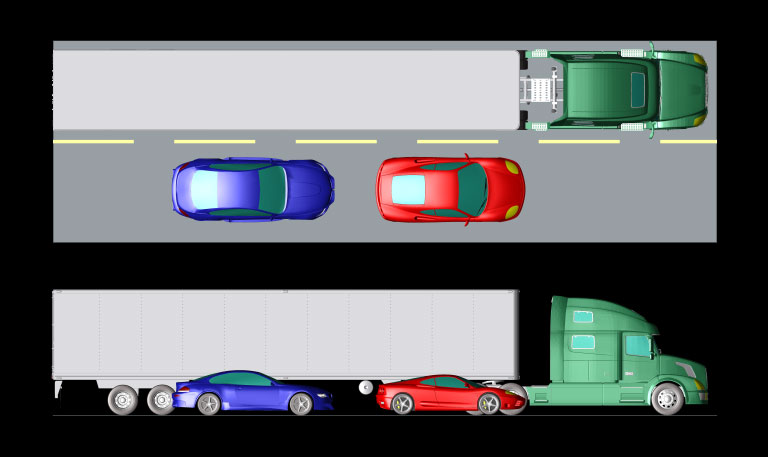
Figura 1: Configuración con dos vehículos de pasajeros y un camión con remolque en una carretera.
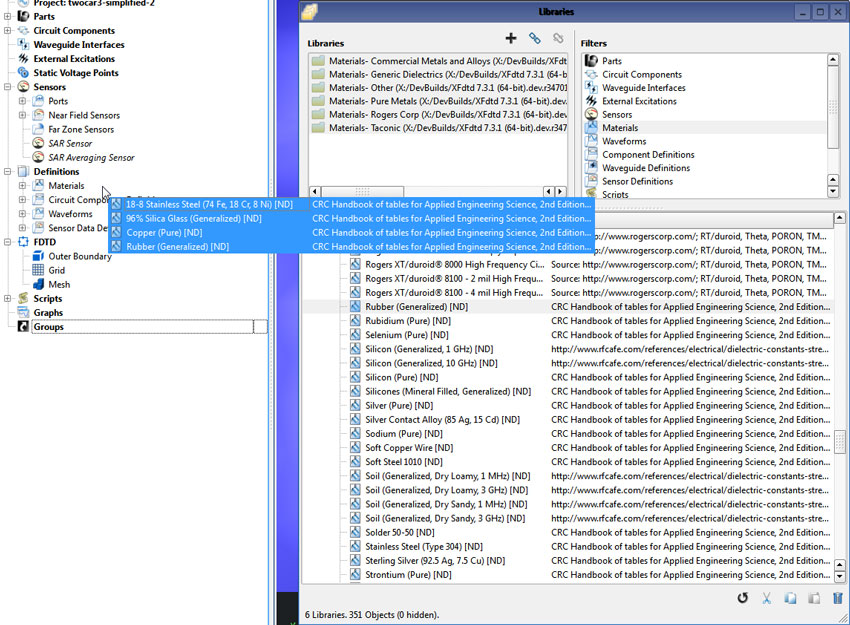
Figura 2: Añadir materiales al proyecto XF.
Cada vehículo se colocó en la superficie de la carretera utilizando sistemas de coordenadas de trabajo parametrizables. Esto permite realizar experimentos posteriores sobre el rendimiento del sistema en función de la posición respecto a otros vehículos. El vídeo 1 muestra cómo un barrido de parámetros puede modificar la posición de un vehículo. Para este ejemplo inmediato, la posición se fija de tal manera que aproximadamente 1,5 metros separan los dos coches.
Para este trabajo se consideraron varias ubicaciones de montaje potenciales, incluidos el parachoques delantero, el techo y el maletero. La función Locator de XF permite a los usuarios cambiar rápidamente las ubicaciones de las antenas para facilitar las investigaciones sobre su colocación. El vídeo 2 muestra el uso de Locator. Al final, la posición del parachoques delantero que se muestra al final del vídeo sirve como punto de montaje para nuestro ejemplo.
El volumen total del espacio del problema es de 3,6x106 λ3, lo que supone más de 3.700 millones de celdas malladas y requiere casi 120 GB de RAM para la simulación. Un espacio eléctricamente tan grande habría descartado el uso de un solucionador de onda completa no hace mucho tiempo; sin embargo, MPI + XStream de Remcom y el soporte de gran memoria permiten a XF resolver fácilmente este problema. Esta simulación se completó en aproximadamente 22 minutos utilizando 24 GPU M2090 en el cluster PSG de NVIDIA, cuyo tiempo fue proporcionado por cortesía de NVIDIA Corporation.
Las figuras 3 y 4 muestran los campos eléctricos en estado estacionario a 5,9 GHz en un corte plano a través del centro de los dos coches. Los resultados oscilan entre los -20 dB mostrados en rojo y los -100 dB mostrados en negro. La figura 5 muestra una vista de arriba abajo de un corte planar de los datos de campo guardados a la altura del transmisor, y la figura 6 presenta una vista de cerca de las interacciones de campo entre los dos coches. Las demás figuras muestran los mismos datos desde distintos ángulos de visión.
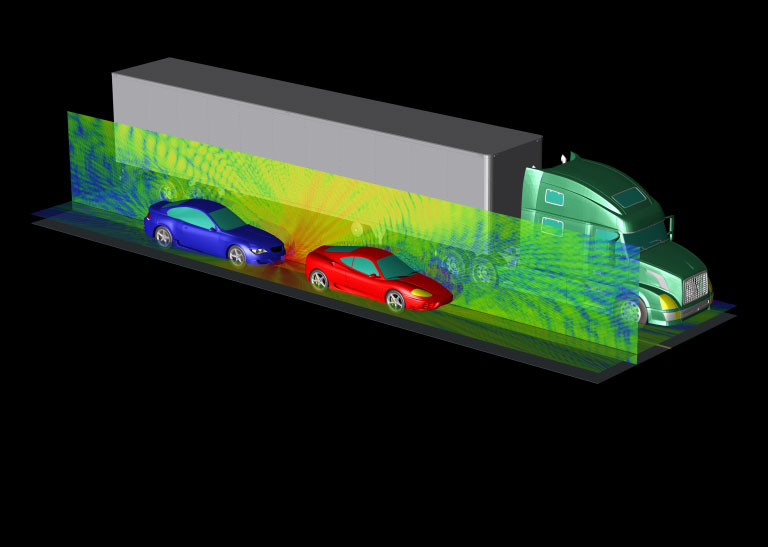
Figura 3: Resultados del campo eléctrico en estado estacionario a 5,9 GHz cerca del transmisor.

Figura 4: Resultados del campo eléctrico en estado estacionario en el plano vertical que contiene el transmisor.
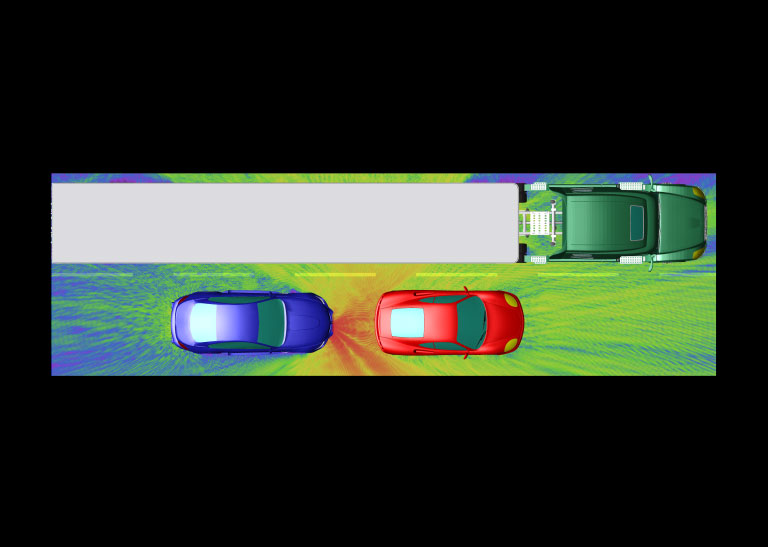
Figura 5: Vista de arriba abajo de los campos eléctricos en estado estacionario a 5,9 GHz.
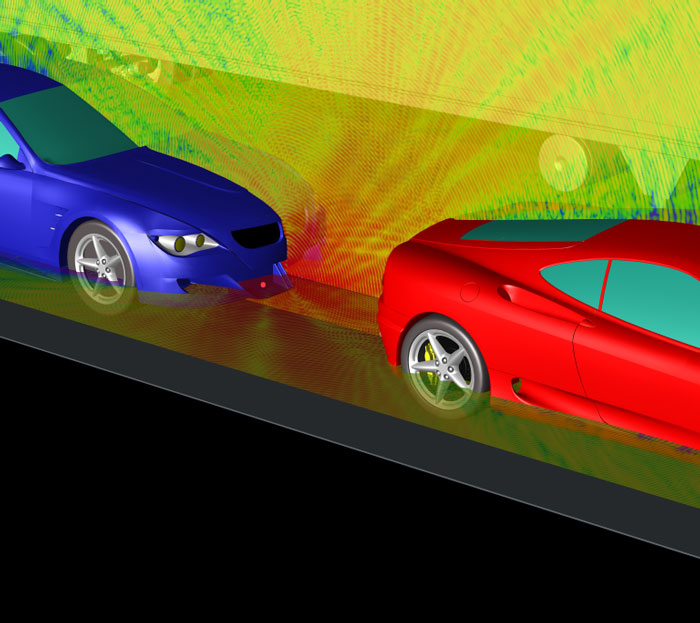
Figura 6: Resultados del campo eléctrico en estado estacionario a 5,9 GHz cerca del transmisor (punto rojo).
Una vez concluida esta prueba de concepto, podemos seguir investigando. En el futuro estudiaremos el efecto de la posición de los vehículos en el enlace de comunicaciones. También podemos considerar el impacto de la colocación de la antena y la composición del material de los vehículos. También pueden modelarse variables ambientales como la comparación del rendimiento en una carretera seca frente a una mojada o en un cañón urbano en lugar de en una autopista. La combinación de MPI y la aceleración XStream en la GPU proporciona al ingeniero de diseño la capacidad necesaria para caracterizar y comprender este complejo problema.


