 Resumen:
Resumen:
Las tendencias en seguridad automovilística están llevando a los sistemas de radar a niveles más altos de precisión y fiabilidad en la identificación de objetivos para la detección de ángulos muertos y la prevención de colisiones. En consecuencia, los ingenieros necesitan comprender mejor cómo afectan los soportes de montaje, el salpicadero, el color de la pintura y los conjuntos de parachoques a los patrones de radiación de campo lejano de los sistemas de radar para automóviles de 24 GHz y 77 GHz. La simulación electromagnética (EM), utilizada desde hace tiempo para simulaciones de antenas en vehículos de baja frecuencia (y mayor longitud de onda), incluida la comunicación de vehículo a vehículo, permite ahora realizar análisis de alta fidelidad que van más allá del propio sensor ideal de 24 GHz y 77 GHz, para incluir el conjunto de la antena y las características de la carrocería del automóvil que rodean al dispositivo.
En este artículo se utiliza un sensor de 24 GHz para analizar las diferencias entre la simulación de un sensor autónomo y uno montado en un vehículo. La eficacia del análisis EM en el dominio del tiempo por diferencias finitas (FDTD ), combinada con una espectacular aceleración de los cálculos gracias a las unidades de procesamiento gráfico (GPU) CUDA, convierten a XFdtd® de Remcom, una herramienta de software de simulación EM 3D totalmente arbitraria, en una opción óptima para la simulación de un diseño de antena en sistema con este nivel de complejidad.

La simulación XFdtd de un sensor de 24 GHz montado en el parachoques trasero de un turismo sirve de marco para el debate de este artículo.
Retos de diseño a altas frecuencias
Las longitudes de onda más cortas de 24 GHz y 77 GHz plantean retos de diseño que no se dan en aplicaciones a frecuencias más bajas, como la comunicación de vehículo a vehículo a 5,9 GHz. En el nivel del sensor, las estructuras de las capas de la placa de circuito impreso se hacen eléctricamente grandes y pueden causar interferencias inesperadas. Asimismo, cuando el sensor se monta en un vehículo, el grosor del salpicadero puede distorsionar las ondas radiadas y provocar reflexiones no deseadas. Algunos de estos problemas obligan a modificar el diseño del sensor, mientras que otros se resuelven mejor proporcionando directrices a los fabricantes de automóviles. En cualquier caso, los ingenieros necesitan una herramienta que les permita realizar análisis de alta fidelidad y detectar problemas en el diseño, teniendo en cuenta todos los aspectos que afectan al rendimiento del sensor.
El radar es intrínsecamente un dominio temporal
El radar es un proceso inherentemente temporal: una señal sale de un transmisor, se refleja en un objeto y vuelve al receptor. Aunque gran parte del diseño del radar se realiza a nivel de sistemas con conceptos matemáticos de procesamiento de señales, los problemas de integridad de la señal pueden producirse en la placa de circuito local del radar y afectar negativamente al rendimiento general del sistema de radar. El simple examen del contenido de frecuencia de estas áreas problemáticas de corriente o tensión no deseadas puede no proporcionar suficiente información para diseñar a fondo o solucionar los problemas del sistema de radar.
La simulación EM FDTD tiene la capacidad de mostrar el movimiento de las señales en función del tiempo. Rastrear la fuente de una corriente o tensión determinada que llega a una zona problemática del circuito puede revelar el origen de un problema de rendimiento en un dispositivo de radar. El problema puede deberse a un acoplamiento no deseado entre las trazas de señal de la placa. El problema puede deberse a la energía que desciende de la antena o de otra parte del circuito con un Q elevado. Estos fenómenos dependientes del tiempo no se pueden ver claramente con un enfoque puramente del dominio de la frecuencia; la simulación del dominio del tiempo es necesaria para encontrar este tipo de problemas.
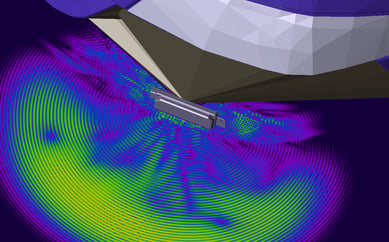
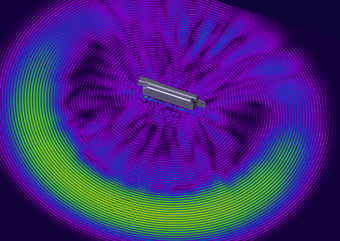
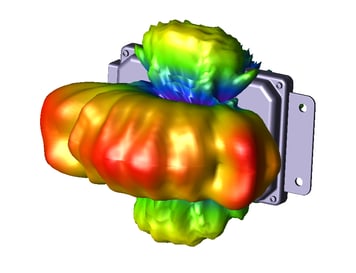
Los campos temporales muestran las interacciones dentro del sensor.
Además, una vez montado el sensor en un vehículo, las interferencias en la antena recibida pueden dificultar la identificación del objetivo. Estas interferencias pueden deberse a una configuración de resonancia en el conjunto del parachoques o a reflexiones procedentes de los soportes de montaje. La simulación EM FDTD y la tecnología informática GPU permiten ahora incluir estructuras de mayor tamaño, como el parachoques o la parte trasera de un automóvil, en las simulaciones de dispositivos de radar para automóviles. Las simulaciones EM de alta fidelidad de radares de 24 GHz o 77 GHz montados en el interior de los parachoques de los automóviles pueden ayudar a los ingenieros de aplicaciones y a sus clientes a analizar a fondo el rendimiento de la antena y cómo cambia con la estructura y los materiales del vehículo durante el ciclo de diseño.
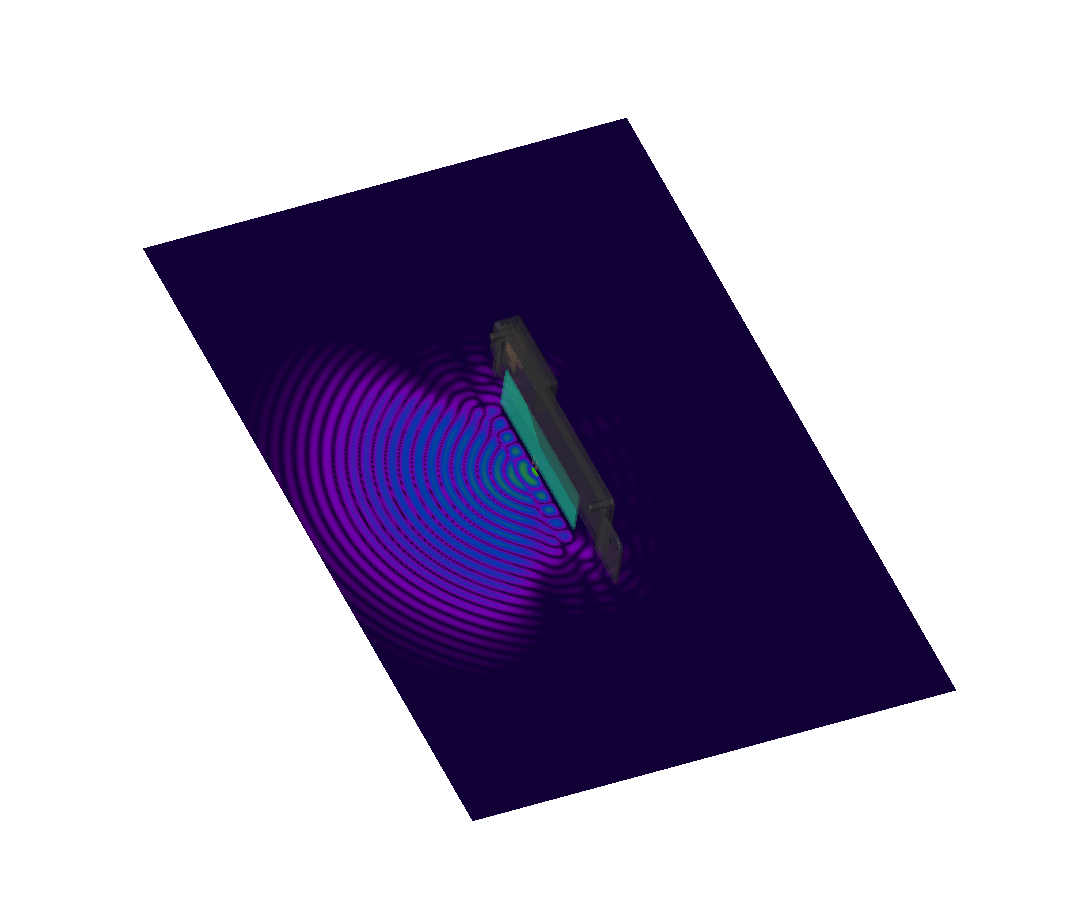
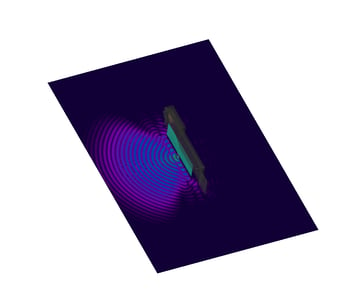
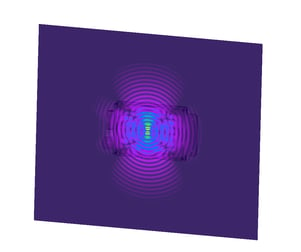
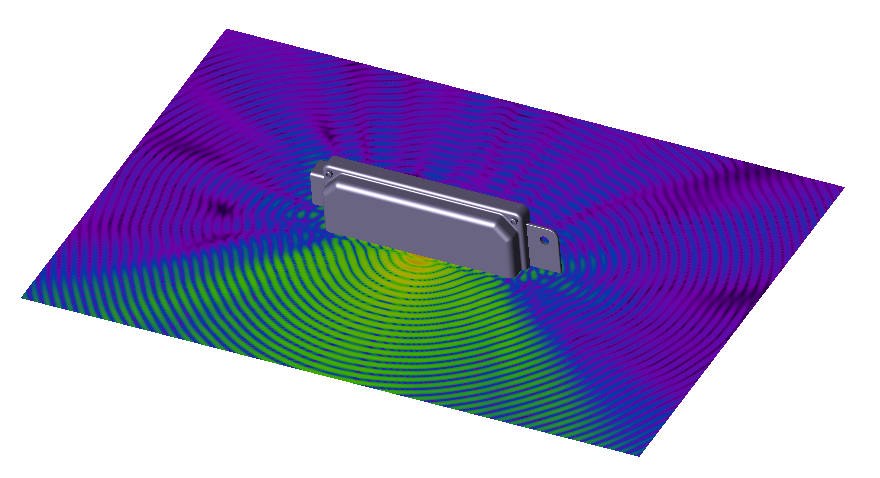
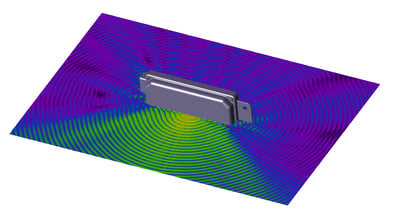
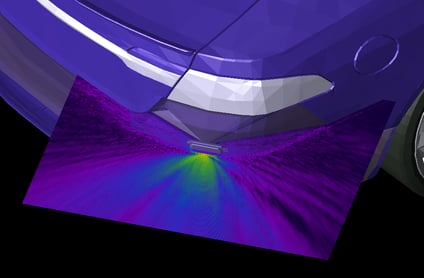
Distribución de los campos eléctricos 1,8 ns después del lanzamiento.
En las figuras anteriores se comparan los campos eléctricos a medida que se alejan del sensor. A diferencia del caso autónomo de la derecha, en el de la izquierda la fascia atrapa las ondas. Esto es indeseable porque distorsiona los campos transmitidos y porque los campos atrapados se reflejan en el receptor, causando interferencias.
La parametrización explora más allá de la antena
En el diseño de radares para automóviles no basta con analizar y simular las características ideales de la antena en el dominio de la frecuencia. Los detalles del embalaje cercanos a la antena, así como las características de la carrocería del vehículo a un metro de distancia de la antena, también afectan a los patrones de campo lejano de la antena y al rendimiento del sistema de radar. Empezando justo en la construcción de la antena, la alineación de múltiples capas (registro) durante el montaje puede afectar al rendimiento de la antena. Los efectos en los bordes del dieléctrico de una placa de circuitos, los tornillos de montaje que sujetan la placa de circuitos a un paquete y cualquier cubierta o radomo del paquete sobre la antena pueden alterar el patrón de radiación de la antena o causar reflexiones en el dominio del tiempo hacia la antena que no aparecen en el diseño a nivel de sistemas. Más allá del embalaje del dispositivo de radar para automóviles, el parachoques y toda la sección cercana del vehículo también afectarán al rendimiento de la antena y del sistema de radar. Si se tienen en cuenta los materiales del vehículo y del parachoques, las formas, las dimensiones y el embalaje del dispositivo, se crean muchas variables que hay que explorar en el diseño del sistema de radar.
Uno de los métodos para probar múltiples dimensiones de variación -materiales de parachoques, revestimientos de pintura y espesores- es mediante barridos de parámetros en la simulación EM. Casi cualquier cantidad especificada en una simulación puede hacerse mediante una variable y, por tanto, barrer un rango de valores de forma automatizada. Los barridos paramétricos pueden variar geometrías como la ubicación de montaje del dispositivo de radar del automóvil horizontalmente a lo largo del parachoques y alrededor de su esquina curva. Los barridos anidados que varían más de un parámetro a la vez son útiles para explorar el espacio de diseño al principio del ciclo de diseño y obtener valiosos conocimientos e intuición sobre el rendimiento del sistema. Los análisis de sensibilidad y las optimizaciones también cambian los valores de los parámetros en múltiples iteraciones de simulación; normalmente se utilizan más adelante en el ciclo de diseño para la validación.
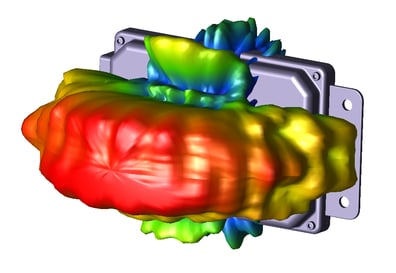
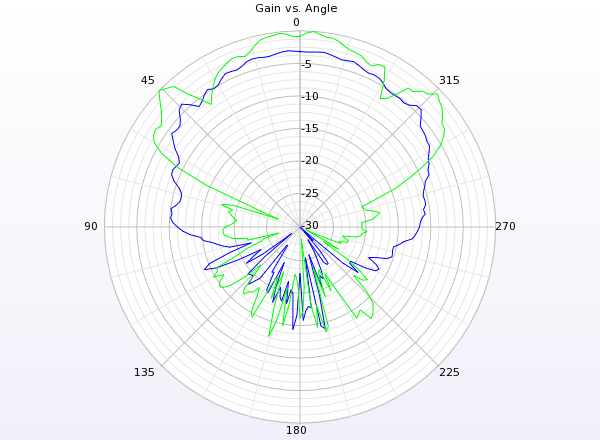
El análisis paramétrico se utiliza para mejorar el rendimiento del diseño.
Tamaño de simulación del vehículo en relación con la longitud de onda
La simulación de estructuras de antena individuales y sus diagramas de radiación de campo lejano ha sido un elemento básico del software de simulación EM durante muchos años. Esto incluye tanto antenas autónomas como antenas en chip estrechamente conectadas a amplificadores en circuitos integrados (CI). Más recientemente, con el advenimiento de la informática de 64 bits y el aumento de RAM que pone a disposición para simulaciones individuales, la simulación EM se ha ampliado para incluir antenas y vehículos juntos; sin embargo, el vehículo podría estar representado en una formulación EM diferente que sólo puede mirar la superficie metálica de un coche, satélite, barco o avión.
El reto para lograr una simulación de alta precisión de estructuras de antena y vehículos a la vez, utilizando una simulación EM 3D totalmente arbitraria, ha sido el tamaño del problema de simulación, a menudo descrito en términos del número de elementos de la malla o cuánta RAM (memoria) consume el problema. Una simulación que requiere demasiados GB de RAM resulta poco práctica, bien porque tarda demasiadas horas en ejecutarse, bien porque la simulación supera por completo la capacidad del hardware informático disponible.
Las GPU reducen el tiempo de simulación para problemas de 4 GB y 20 GB.
La simulación EM de una antena generalmente se escala con la frecuencia de la señal porque la precisión de la simulación EM se basa en gran medida en el número de celdas de malla por longitud de onda. La simulación de una antena dipolo de media longitud de onda requiere aproximadamente el mismo tiempo de simulación a baja o alta frecuencia porque el tamaño de la celda de malla se ajusta a la dimensión de la antena en función de la longitud de onda. La simulación de una antena montada en un vehículo en una simulación EM 3D totalmente arbitraria incluye ambas estructuras. Una frecuencia de señal más alta significa una longitud de onda más pequeña y se necesita un tamaño de celda más pequeño para acomodar la antena. Esta malla más pequeña significa que se utilizan más celdas de malla para simular las partes del coche.
El tamaño de la malla puede variar dentro de una misma simulación, con celdas de malla más grandes, de 1,25 mm, alrededor de grandes características físicas, como los conjuntos de parachoques, y celdas de malla más pequeñas, de 0,04 mm, cerca de geometrías más finas, como la estructura de alimentación de la antena de un sensor, pero siempre hay un límite en el rango de tamaño de la malla que resulta práctico o preciso para una sola simulación. La posibilidad de simular ahora un dispositivo de radar de alta frecuencia y una antena junto con la zona del parachoques de un coche en una simulación EM 3D totalmente arbitraria es una ventaja del método FDTD de simulación EM. El método FDTD permite escalar el tamaño de la malla de forma lineal con el tamaño del problema y aprovechar la enorme eficiencia de los sistemas GPU con CUDA.
La simulación FDTD aumenta linealmente con el tamaño del problema
En el mundo de la simulación EM 3D totalmente arbitraria, existen formulaciones en el dominio de la frecuencia y en el dominio del tiempo. Aunque ambos tipos pueden simular datos de estado estacionario en el dominio de la frecuencia, incluidos los parámetros S, existen diferencias en la rapidez con la que crece el tiempo de simulación a medida que aumenta el tamaño del problema de simulación. Existen formulaciones de simulación EM en el dominio de la frecuencia en las que el tiempo de simulación crece a una tasa de n-cuadrado, donde n es el tamaño del problema. Una de las ventajas de la simulación FDTD para problemas de gran tamaño es que el tiempo de ejecución de la simulación en el dominio del tiempo crece sólo linealmente a medida que crece el tamaño del problema de simulación1. Cuanto mayor sea el tamaño del problema, mayor será el beneficio relativo de la simulación en el dominio del tiempo frente a la simulación en el dominio de la frecuencia.
Los simuladores de dominio temporal ejecutan una simulación completa para cada puerto de un diseño. En general, los simuladores en el dominio de la frecuencia no necesitan hacer esto. Para algunas simulaciones con muchos puertos, una formulación EM en el dominio de la frecuencia, como el método de elementos finitos (MEF), puede ser una buena opción. Para una aplicación de antena que no implique muchos puertos de señal en un diseño, la simulación en el dominio del tiempo tiene la ventaja para problemas de gran tamaño.
FDTD se paraleliza bien con las GPU
Uno de los métodos más utilizados para simular grandes estructuras EM con rapidez es el uso de GPUs con CUDA. CUDA (Compute Unified Device Architecture) es una plataforma de cálculo paralelo creada por NVIDIA e implementada en las unidades de procesamiento gráfico (GPU) que produce. Desarrolladas originalmente para acelerar gráficos de vídeo, las GPU son populares para muchas aplicaciones de alta computación (HPC).
La comparación entre el cálculo en la GPU y en la CPU tradicional es espectacular. Las GPU pueden aplicar cientos de procesadores donde las CPU sólo pueden ofrecer unos pocos. Más que la simulación EM en el dominio de la frecuencia, la simulación EM en el dominio del tiempo se paraleliza bien; FDTD puede aprovechar al máximo la aceleración del tiempo de simulación que ofrecen las GPU.
Resumen
Diseñar un sensor de radar para automóviles es una tarea ardua incluso antes de introducir las complejidades de los soportes de montaje y los conjuntos de parachoques. La simulación computacional FDTD EM ofrece las herramientas necesarias para que los ingenieros realicen un análisis de alta fidelidad del sensor mientras consideran las configuraciones de montaje finales. Esto es posible gracias a la tecnología XStream® GPU Acceleration de XFdtd, que reduce enormemente el tiempo de simulación EM aprovechando las GPU y permitiendo a XF realizar cálculos numéricos FDTD ultrarrápidos. Al final, los ingenieros pueden hacer avanzar la industria de la seguridad del automóvil aumentando la fiabilidad y precisión de los sistemas de radar.
Referencias:
[1] Microwave Circuit Modeling Using Electromagnetic Field Simulation por Daniel G. Swanson, Jr. y Wolfgang J. R. Hoefer, Artech House c 2003 ISBN: 1-58053-308-6