 Resumen:
Resumen:
Para satisfacer las crecientes necesidades de precisión de los trabajos de diseño de radares de automoción de alto rendimiento, el método de simulación EM FDTD se ha revelado como una solución mejor que las formulaciones FEM tradicionales. FDTD supera las limitaciones de FEM que obligan a los ingenieros de diseño a sacrificar precisión y simplificar sus modelos de simulación. En este artículo se presentan las ventajas de FDTD para los diseñadores de circuitos y sistemas de radares de automoción.
Los ingenieros de radiofrecuencia llevan muchos años utilizando la simulación electromagnética como ayuda para el diseño de sensores de radar para automóviles, pero las crecientes exigencias de los sistemas avanzados de asistencia al conductor (ADAS) están cambiando los métodos utilizados. El modelado preciso de circuitos y sistemas de antenas cada vez más complejos da lugar a problemas de simulación demasiado grandes (en términos de memoria física - RAM) para las formulaciones tradicionales del método de los elementos finitos (MEF) en el dominio de la frecuencia. Como consecuencia de estas limitaciones, los ingenieros de diseño que utilizan herramientas MEF se ven obligados a simplificar sus modelos de simulación para adaptarlos a los recursos informáticos disponibles, sacrificando precisión y limitando la eficacia de su simulador.
Para satisfacer las crecientes necesidades de precisión de los trabajos de diseño de radares de automoción de alto rendimiento, el método de diferencias finitas en el dominio del tiempo (F DTD) ha surgido como la solución. El método FDTD no sólo ofrece a los ingenieros la posibilidad de simular problemas de gran envergadura con la tecnología de la unidad de procesamiento gráfico (GPU), sino que, además, permite observar la propagación de los campos eléctricos a través del espacio de simulación y detectar acoplamientos de señales no deseados en el dominio temporal.

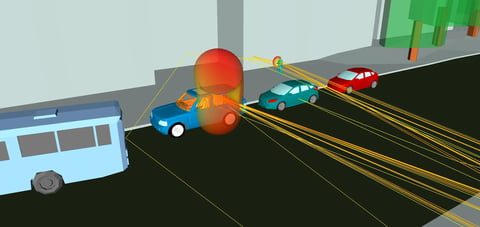
Patrón de radiación para un sensor de radar de largo alcance.
Simulación EM en el dominio del tiempo
Los simuladores EM de onda completa suelen clasificarse en dos categorías (frecuencia o dominio temporal) en función de la forma de la ecuación de Maxwell que resuelve el simulador. La FDTD es una técnica de primeros principios que resuelve directamente las ecuaciones de Maxwell dependientes del tiempo -las leyes de Ampere y Faraday- discretizando tanto el tiempo como el espacio. Durante una simulación, la señal en el dominio temporal se analiza a medida que se desplaza por la malla de la estructura de simulación en pasos de tiempo que se basan en el tamaño de las características geométricas.
Ambos tipos de simuladores EM de microondas proporcionan resultados en el dominio de la frecuencia, como parámetros S, campos E y H y diagramas de radiación de antena de campo lejano. La FDTD lo consigue mediante una transformada de Fourier de los datos en el dominio temporal. La FDTD también permite a los usuarios simular señales de excitación y respuestas en el dominio temporal, incluida la reflectometría en el dominio temporal (TDR).
El dominio temporal revela el origen del acoplamiento
El análisis del acoplamiento no deseado y de la diafonía, fundamental para el análisis de la integridad de la señal (SI) de las placas de circuito impreso de alta frecuencia, suele analizar las magnitudes de puerto relacionadas con las redes o las trazas de señal. La diafonía puede expresarse en términos de parámetros S o visualizarse como mapas de calor de la distribución del campo en el dominio de la frecuencia. Estos tipos de resultados permiten verificar la existencia de un problema, pero sirven de poco para identificar la causa raíz.
Con el análisis FDTD, se puede observar cómo se produce el acoplamiento. En la Figura 1, se aplica una señal en el dominio del tiempo en la parte superior de la microstrip (región con campos rojos). Tal y como está diseñada, la señal se desplaza por la traza y hacia la izquierda. Inesperadamente, la señal también viaja a través del plano de tierra y se acopla a otra traza (parte superior izquierda de la fuente). La visualización del resultado de estado estacionario en el dominio de la frecuencia verificaría el acoplamiento, pero no identifica la ruta de acoplamiento exacta que es claramente visible en el dominio del tiempo. Para un circuito de radar de automóvil, con múltiples trazas que alimentan conjuntos de elementos de antena, la capacidad de identificar una ruta de acoplamiento específica entre muchas rutas posibles es crucial para lograr diseños exitosos de forma consistente.
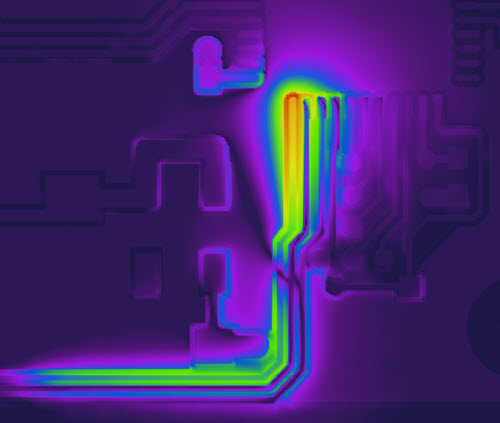
Figura 1: Los campos se acoplan inesperadamente a través del plano de tierra a una traza cercana.
Requisitos de memoria para modelos eléctricamente grandes y complejos
Los circuitos y antenas de radar para automóviles de 24 GHz y 77 GHz tienen longitudes de onda de 1,25 cm y 0,4 cm, respectivamente. La simulación EM se adapta a la longitud de onda y al tamaño de las características, con 10-20 elementos de malla por longitud de onda. Un sensor de radar de automóvil completo -incluida una placa de circuito de RF totalmente detallada, un radomo, un conector de datos y una carcasa- es eléctricamente grande y da lugar a una gran malla de simulación. Para una simulación por elementos finitos, la malla tetraédrica puede llegar a ser muy compleja, lo que da lugar a matrices enormes que requieren grandes cantidades de memoria informática para resolverse.
La simulación FDTD EM permite simular estos modelos complejos porque el tiempo de cálculo FDTD crece linealmente, o algo más que linealmente, con el aumento del tamaño del problema (malla)1. Como resultado, una simulación que contenga un sensor de 25 GHz completamente detallado y un trozo de fascia requiere menos de 8 GB de RAM. En el contexto de la simulación de sistemas, el uso de la simulación FDTD significa alta fidelidad; no es necesario hacer simplificaciones en el diseño que sacrifiquen la precisión de la simulación para reducir los requisitos de memoria.
Las GPU aceleran la simulación FDTD
Además de manejar simulaciones eléctricamente grandes con una cantidad mínima de RAM, FDTD puede simular esas estructuras rápidamente utilizando unidades de procesamiento gráfico (GPU). Una GPU es una pieza de hardware que contiene RAM y procesadores, de forma similar a una CPU. Sin embargo, a diferencia de una CPU con unos pocos núcleos, una GPU puede tener miles. Por ejemplo, la NVIDIA K40 tiene 2.880 núcleos. Esta enorme capacidad de procesamiento paralelo ha hecho que las GPU ganen popularidad en muchas aplicaciones de alta computación (HPC).
No todas las formulaciones EM se benefician de la capacidad de procesamiento paralelo de una GPU. En el análisis MEF, la malla no estructurada se almacena en matrices dispersas y se requiere un nivel adicional de indirección para asignar las ubicaciones espaciales adyacentes de los elementos a las direcciones de memoria durante las operaciones de inversión de la matriz. Esto obstaculiza la eficacia del procesamiento paralelo y limita el aumento de velocidad a aproximadamente 5 veces. En cambio, la malla FDTD y los datos de campo se almacenan en matrices muy estructuradas en la memoria. Esto permite a la GPU paralelizar de forma eficiente el cálculo FDTD y acceder a los datos de los campos eléctrico y magnético. Como resultado, las simulaciones FDTD se ejecutan 40 veces más rápido si se comparan la GPU y la CPU en el caso de un sensor de radar de automoción de 25 GHz.
Conclusión
La FDTD es el método de simulación preferido para el diseño de sensores de radar de automoción porque es capaz de resolver modelos eléctricos complejos y de gran tamaño con requisitos mínimos de memoria RAM. Si se combina con la aceleración en la GPU, los ingenieros pueden obtener resultados en cuestión de horas e identificar de forma más eficiente los puntos en los que es necesario mejorar el diseño. En definitiva, FDTD amplía la capacidad de simulación EM de los diseñadores de circuitos y sistemas de radar para automoción.
Referencias:
1. "Microwave Circuit Modeling Using Electromagnetic Field Simulation" por Daniel G. Swanson, Jr. y Wolfgang J. R. Hoefer, copyright 2003 Artech House ISBN 1-58053-308-6 página 155